|
Arduino-OWI
One-Wire Interface (OWI) library for Arduino
|
|
Arduino-OWI
One-Wire Interface (OWI) library for Arduino
|
#include <Arduino.h>
Classes | |
| struct | analog_read_res_t |
Public Types | |
| enum | { PIN_MODE = 0x11, DIGITAL_READ = 0x22, DIGITAL_WRITE = 0x33, ANALOG_READ = 0x44, ANALOG_WRITE = 0x55, SRAM_READ = 0x66, SRAM_WRITE = 0x77, EEPROM_READ = 0x88, EEPROM_WRITE = 0x99, DIGITAL_PINS = 0xaa, ANALOG_PINS = 0xbb } |
Public Member Functions | |
| Arduino (OWI &owi, uint8_t *rom=NULL) | |
| uint8_t | label () |
| void | label (uint8_t nr) |
| int | pinMode (int pin, int mode) |
| int | digitalRead (int pin) |
| int | digitalWrite (int pin, int value) |
| int | analogRead (int pin) |
| int | analogWrite (int pin, int duty) |
| int | num_digital_pins () |
| int | num_analog_inputs () |
| int | read_rom () |
| int | label_rom (uint8_t nr) |
| int | print_rom (Print &out=Serial) |
| void | rom (const uint8_t *rom) |
| uint8_t * | rom () |
| void | rom_P (const uint8_t *rom) |
Static Public Attributes | |
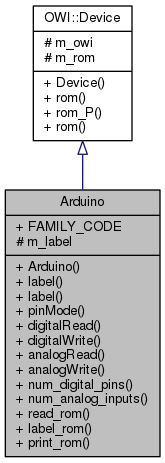
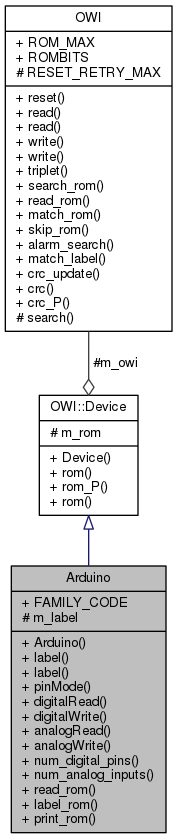
| static const uint8_t | FAMILY_CODE = 0x60 |
Protected Attributes | |
| uint8_t | m_label |
| OWI & | m_owi |
| uint8_t | m_rom [ROM_MAX] |
One-Wire Interface (OWI) Remote Arduino Device Driver. Core functions are implemented as one-wire communication. See OWI/examples/Slave, Slave and Master sketches for examples.
| anonymous enum |
One-Wire Interface (OWI) Remote Arduino Device function codes.
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inlineinherited |
|
inlineinherited |
|
inlineinherited |
|
static |
|
protectedinherited |
|
protectedinherited |
 1.8.11
1.8.11 
