|
COSA
An Object-Oriented Platform for Arduino Programming
|
|
COSA
An Object-Oriented Platform for Arduino Programming
|
#include <L3G4200D.hh>
Classes | |
| union | ctrl_reg1_t |
| union | ctrl_reg2_t |
| union | ctrl_reg3_t |
| union | ctrl_reg4_t |
| union | ctrl_reg5_t |
| union | fifo_ctrl_reg_t |
| union | fifo_src_reg_t |
| union | int1_cfg_t |
| struct | int1_duration_t |
| struct | int1_src_t |
| struct | sample_t |
| union | status_reg_t |
Public Member Functions | |
| L3G4200D (uint8_t subaddr=0) | |
| bool | begin () |
| bool | end () |
| void | sample (sample_t &s) |
Protected Types | |
| enum | Register { WHO_A_I = 0x0F, CTRL_REG1 = 0x20, CTRL_REG2 = 0x21, CTRL_REG3 = 0x22, CTRL_REG4 = 0x23, CTRL_REG5 = 0x24, REFERENCE = 0x25, OUT_TEMP = 0x26, STATUS_REG = 0x27, OUT = 0x28, OUT_X = 0x28, OUT_X_L = 0x28, OUT_X_H = 0x29, OUT_Y = 0x2A, OUT_Y_L = 0x2A, OUT_Y_H = 0x2B, OUT_Z = 0x2C, OUT_Z_L = 0x2C, OUT_Z_H = 0x2D, FIFO_CTRL_REG = 0x2E, FIFO_SRC_REG = 0x2F, INT1_CFG = 0x30, INT1_SRC = 0x31, INT1_TSH = 0x32, INT1_TSH_XH = 0x32, INT1_TSH_XL = 0x33, INT1_TSH_YH = 0x34, INT1_TSH_YL = 0x35, INT1_TSH_ZH = 0x36, INT1_TSH_ZL = 0x37, INT1_DURATION = 0x38 } |
| enum | { DR_100_HZ, DR_200_HZ, DR_400_HZ, DR_800_HZ } |
| enum | { BW_12_5, BW_25, BW_50, BW_110 } |
| enum | { HPM_NORMAL = 0, HPM_MODE = 1, HPM_AUTORESET = 3 } |
| enum | { FM_BYPASS, FM_FIFO, FM_STREAM, FM_STREAM_TO_FIFO, FM_BYPASS_TO_STREAM } |
Protected Member Functions | |
| void | write (Register reg, uint8_t value) |
| void | write (Register reg, void *buffer, uint8_t count) |
| uint8_t | read (Register reg) |
| void | read (Register reg, void *buffer, uint8_t count) |
Static Protected Attributes | |
| static const uint8_t | AUTO_INC = 0x80 |
Private Member Functions | |
| bool | is_async () const |
| void | sync_request () |
| void | async_request () |
| virtual void | on_completion (uint8_t type, int count) |
Private Attributes | |
| uint8_t | m_addr |
| bool | m_async |
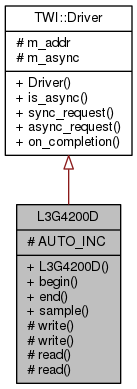
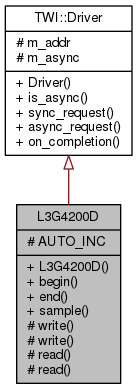
Cosa TWI driver for STMicroelectronics, L3G4200D, MEMS motion sensor: ultra-stable three-axis digital output gyroscope. Doc ID 17116 Rev 3.
The GY-80 10DOF module with pull-up resistors (4K7) for TWI signals and 3V3 internal voltage converter.
Definition at line 55 of file L3G4200D.hh.
|
protected |
| Enumerator | |
|---|---|
| DR_100_HZ |
Data rate (table 22). 100 Hz. |
| DR_200_HZ |
200 Hz. |
| DR_400_HZ |
400 Hz. |
| DR_800_HZ |
800 Hz. |
Definition at line 159 of file L3G4200D.hh.
|
protected |
| Enumerator | |
|---|---|
| BW_12_5 |
Bandwidth selection (table 22). Note: Higher with 800 Hz. |
| BW_25 | |
| BW_50 | |
| BW_110 | |
Definition at line 165 of file L3G4200D.hh.
|
protected |
| Enumerator | |
|---|---|
| HPM_NORMAL |
High pass filter mode (table 26). Normal moden (reset reading). |
| HPM_MODE |
Reference signal for filtering. |
| HPM_AUTORESET |
Autoreset on interrupt event. |
Definition at line 191 of file L3G4200D.hh.
|
protected |
| Enumerator | |
|---|---|
| FM_BYPASS |
FIFO mode configuration (table 45). Bypass mode. |
| FM_FIFO |
FIFO mode. |
| FM_STREAM |
Stream. |
| FM_STREAM_TO_FIFO |
Stream-to-FIFO. |
| FM_BYPASS_TO_STREAM |
Bypass-to-Stream. |
Definition at line 310 of file L3G4200D.hh.
|
protected |
Register address map (See tab. 18, pp. 27).
| Enumerator | |
|---|---|
| WHO_A_I |
Device identification register. |
| CTRL_REG1 |
Control register#1. |
| CTRL_REG2 |
Control register#2. |
| CTRL_REG3 |
Control register#3. |
| CTRL_REG4 |
Control register#4. |
| CTRL_REG5 |
Control register#5. |
| REFERENCE |
Reference value for interrupt generation. |
| OUT_TEMP |
Temperature data. |
| STATUS_REG |
Status register. |
| OUT |
X,Y,Z-axis angular rate data. |
| OUT_X |
X axis angular rate data. |
| OUT_X_L |
X low byte. |
| OUT_X_H |
X high byte. |
| OUT_Y |
Y axis angular rate data. |
| OUT_Y_L |
Y low byte. |
| OUT_Y_H |
Y high byte. |
| OUT_Z |
Y axis angular rate data. |
| OUT_Z_L |
Z low byte. |
| OUT_Z_H |
Z high byte. |
| FIFO_CTRL_REG |
FIFO control register. |
| FIFO_SRC_REG |
FIFO status register. |
| INT1_CFG |
Interrupt configuration. |
| INT1_SRC |
Interrupt source register. |
| INT1_TSH |
Interrupt threshold. |
| INT1_TSH_XH |
X high threshold. |
| INT1_TSH_XL |
X low threshold. |
| INT1_TSH_YH |
Y high threshold. |
| INT1_TSH_YL |
Y low threshold. |
| INT1_TSH_ZH |
Z high threshold. |
| INT1_TSH_ZL |
Z low threshold. |
| INT1_DURATION |
Wait duration. |
Definition at line 100 of file L3G4200D.hh.
|
inline |
Construct L3G4200D digital gyroscope driver with given sub-address. Default is zero(0).
| [in] | subaddr | sub-address (0..1, default 0) |
Definition at line 62 of file L3G4200D.hh.
| bool L3G4200D::begin | ( | ) |
Start interaction with device. Turn on measurements.
Definition at line 24 of file L3G4200D.cpp.
| bool L3G4200D::end | ( | ) |
Stop sequence of interaction with device. Turn off measurements and power down.
Definition at line 36 of file L3G4200D.cpp.
|
protected |
Read contents of register.
| [in] | reg | register address. |
Definition at line 59 of file L3G4200D.cpp.
|
protected |
Read contents of registers, multiple values from give address.
| [in] | reg | register address. |
| [in] | buffer | storage. |
| [in] | count | number of bytes. |
Definition at line 70 of file L3G4200D.cpp.
|
inline |
Sample gyroscope and return values in given data structure
| [in] | s | sample storage. |
Definition at line 90 of file L3G4200D.hh.
|
protected |
Write given value to register.
| [in] | reg | register address. |
| [in] | value | register value. |
Definition at line 43 of file L3G4200D.cpp.
|
protected |
Write multiple registers with values from give address.
| [in] | reg | register address. |
| [in] | buffer | storage. |
| [in] | count | number of bytes. |
Definition at line 51 of file L3G4200D.cpp.
|
staticprotected |
Auto increment address.
Definition at line 135 of file L3G4200D.hh.
 1.8.11
1.8.11 
