|
COSA
An Object-Oriented Platform for Arduino Programming
|
|
COSA
An Object-Oriented Platform for Arduino Programming
|
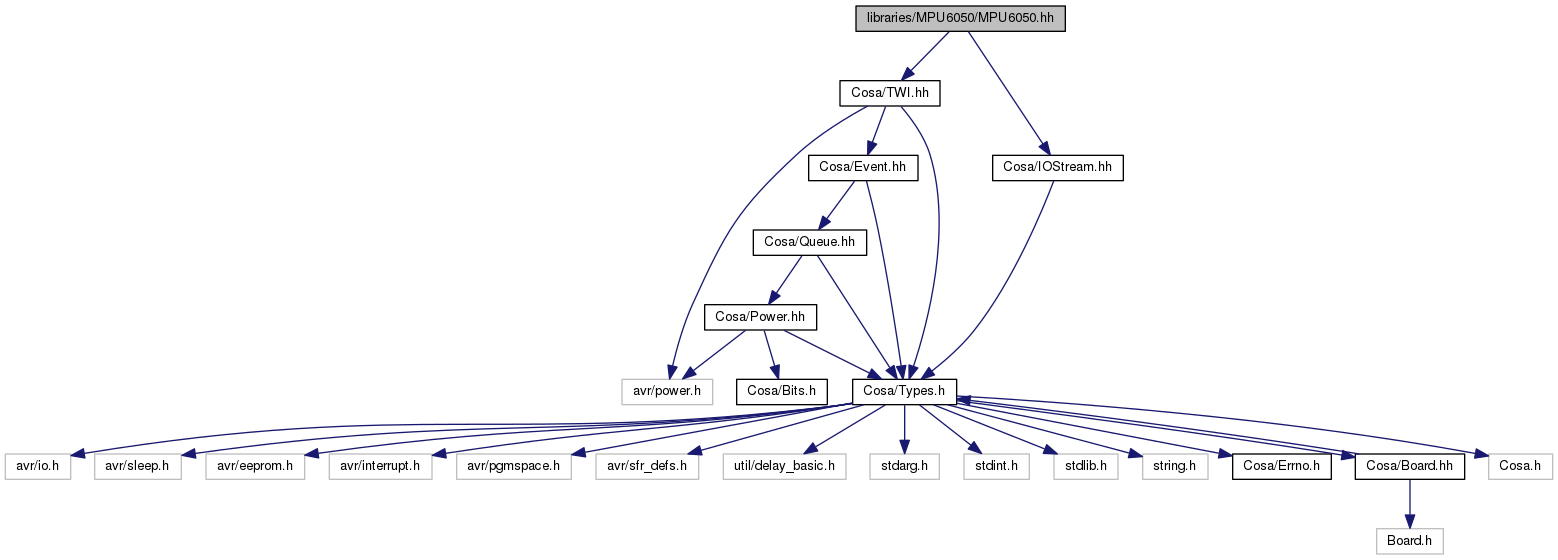

Go to the source code of this file.
Classes | |
| class | MPU6050 |
| struct | MPU6050::sample_t |
| struct | MPU6050::motion_t |
| union | MPU6050::config_t |
| union | MPU6050::gyro_config_t |
| union | MPU6050::accel_config_t |
| union | MPU6050::fifo_en_t |
| union | MPU6050::int_pin_cfg_t |
| union | MPU6050::int_enable_t |
| union | MPU6050::int_status_t |
| union | MPU6050::signal_path_reset_t |
| union | MPU6050::user_ctrl_t |
| union | MPU6050::pwr_mgmt_1_t |
| union | MPU6050::pwr_mgmt_2_t |
Functions | |
| IOStream & | operator<< (IOStream &outs, MPU6050 &mpu) |
Copyright (C) 2013-2015, Mikael Patel
This library is free software; you can redistribute it and/or modify it under the terms of the GNU Lesser General Public License as published by the Free Software Foundation; either version 2.1 of the License, or (at your option) any later version.
This library is distributed in the hope that it will be useful, but WITHOUT ANY WARRANTY; without even the implied warranty of MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the GNU Lesser General Public License for more details.
This file is part of the Arduino Che Cosa project.
Definition in file MPU6050.hh.
Read device and print sensor data to the given output stream.
| [in] | outs | output stream. |
| [in] | mpu | instance. |
Definition at line 120 of file MPU6050.cpp.
 1.8.11
1.8.11 
